“我們的機器人名叫阿喀琉斯,是第一個以生物學上精確的方式行走的機器人。這意味著它不僅像人一樣移動,還能像人類神經系統一樣向腿部發送指令。”
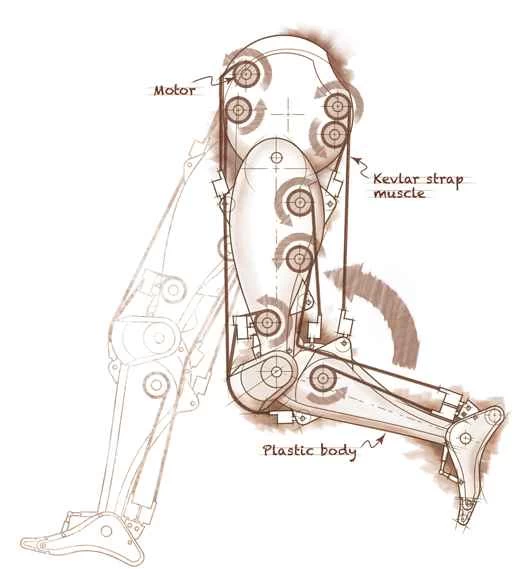
每條腿都由八塊肌肉組成——凱夫拉縴維帶一端連接電機,另一端連接塑膠骨架。馬達轉動時,會拉動纖維帶,模擬人體肌肉的收縮方式。部分跟腱肌肉從髖部或大腿延伸到小腿,因此可以將力量傳遞到整個腿。這使得我們可以將大部分馬達放置在髖部和大腿。馬達位置較高,可以減輕小腿的重量,使其能夠像人類的小腿一樣快速擺動。
在人類中,脊髓中的神經元會發出節律性訊號來控制我們的腿部運動。這就像節拍器一樣,腿部的感覺回饋會改變節奏的節奏。大腦可以介入修正,但它不會直接控制每一塊肌肉,這正是我們能夠無意識地行走的原因。對於我們的機器人來說,運行在外部電腦上的電腦程式以類似的方式控制它的運動。每走一步,電腦會發出一個訊號,使一側髖部肌肉屈曲,另一側髖部肌肉伸展。電腦會根據腿部負荷和角度感測器的回饋來調整這些訊號的時序。類似的控制系統也用於控制下肢肌肉。
人體運動建模的應用遠不止機器人領域。例如,它也能幫助我們了解脊髓損傷患者是如何復原的。但我們的機器人目前仍是一個非常簡化的模型——它沒有軀幹,也無法應付複雜的地形。最初,我們也遇到了機器人腳部打滑的問題。我們考慮過使用不同類型的橡膠來增加其腳部的抓地力,但最終發現已經有現成的解決方案。現在,機器人穿著一雙Keds運動鞋。
生物精確的機器人行走腿
—軌道科學公司工程師特蕾莎·克萊因在亞利桑那大學攻讀研究生期間設計了阿喀琉斯機器人。
