去年十月初,布倫丹‧弗利發現自己身處一艘小型充氣艇上,在愛琴海中央原地打轉。這位43歲的海洋考古學家正在等待三名潛水員,他們正在水下100英尺處搜尋古代沉船。船長喬治是個挺著啤酒肚的希臘人,他沒有拋錨,而是緊緊地把舵向左打,讓船不停地原地打轉。或許是習慣了這種重複的航程,或許只是渾然不覺,喬治似乎不介意繞圈圈。但這重複的航程卻讓弗利感到焦躁不安。他不停地拉扯潛水服的拉鍊,整理著潛水裝備──這些裝備在他當天早些時候的勘測中還濕漉漉的。然後,他坐在我旁邊,坦白了一件對於一個以大海為生的人來說很不尋常的事。 “我討厭小船,”他說,“也不太喜歡大船。”
弗利喜歡尋找沉船,因此他和他的希臘同事選擇了迪亞島作為當天的潛水地點。迪亞島是位於克里特島首府伊拉克利翁以北約8英里的小島,島上遍布岩石。伊拉克利翁作為港口已有約6000年的歷史。在這段時間裡,很可能有許多駛往伊拉克利翁的船隻在迪亞島的懸崖邊觸礁沉沒。 1976年,雅克‧庫斯託在尋找亞特蘭提斯時,曾在迪亞島南岸發現幾處沉船。弗利和他的團隊是第一批探索迪亞島北岸的考古學家。
儘管弗利很喜歡發現沉船——過去14年裡,他已經發現或協助發現了26艘——但他並不喜歡花時間去尋找它們,至少不喜歡用傳統的方式。弗利不會派潛水隊下潛,一次只踢動一下腳蹼,勘測1000英尺長的剖面,而是更傾向於使用自主水下航行器(AUV)來勘測大片海底區域。在機器人無法有效運作的地方,弗利會派遣配備閉路循環呼吸器和推進器的潛水員下潛,以便他們能夠覆蓋更大的區域。他說,他想加快速度,因為他需要更多資訊。海洋考古學家可能要花數年時間才能研究幾個沉船遺址,但對弗利來說,一艘孤立的沉船在統計上意義不大——它只不過是更大對話中的幾個字而已。為了理解整個對話,海洋考古學家必須研究大量的沉船,並從中找出規律。 Foley 的模型不是挖掘和解釋的軟科學,而是基因和藥物研究人員採用的高通量篩選的硬科學。他們以工業化的速度收集數據,並使用強大的電腦分析這些數據,從而能夠檢測到普通分析無法觸及的細微模式。

如果弗利能夠確定成百上千艘古代船隻的航向、航行時間和載貨內容,他就可以利用電腦分析追溯世界最早文明的起源,從而驗證他的核心假設:正是海上貿易促進了地中海盆地文明的傳播。但要用計算機完成這一切,他首先需要“極其精細地繪製整個地中海海底地圖”,這片海域面積近百萬平方英里,可能包含多達30萬艘沉船。
今天的情況尤其艱難。弗利的自主水下航行器(AUV)在迪亞號沉船附近無法運作;那裡陡峭的海底懸崖會幹擾機器人的感測器。此外,有人把推進器的一個關鍵部件落在了伊拉克利翁的碼頭。弗利的團隊無法快速找到沉船,只能用傳統的方式搜尋。他和他的潛水夥伴之前已經潛了一次,但一無所獲。
在繞圈行駛了幾分鐘後,弗利採取了行動。早上早些時候,喬治斯曾提到他很想在這片海域潛水,於是弗利以他一貫的友好態度建議現在正是他潛水的好時機,並補充道:「介意我來開嗎?」弗利接過舵,將發動機轉速調至怠速。船速減慢,在向南駛去的、朝向迪亞黃色懸崖的輕柔波浪中起伏。水溫大約80華氏度,水下能見度約100英尺。現在至少能掌控一些事情了,弗利看起來很放鬆,甚至有些高興。
但如果可以選擇,弗利在風和日麗的日子裡不會待在小船上,甚至不會待在大船上。相反,他會坐在伊拉克利翁鋪瓷磚的露臺上,仔細研究他的機器人收集到的最新數據。

海洋考古學只是高通量技術的最新受益者之一。高通量技術是資料收集和分析領域的革命,其起源可追溯到幾十年前的電腦科學和製造業。這項技術在科學領域最廣為人知的應用當屬人類基因組計劃,這是一項始於1990年的政府計畫。在13年的時間裡,研究人員完成了對構成人類DNA的33億個鹼基對和25,000個基因的定序。高通量篩選的基礎是自動化。機器人有系統地收集數百甚至數百萬個數據點,並將它們輸入大型電腦進行模式分析。在人類基因組計畫中,高通量技術使科學家能夠自動完成一段DNA鹼基對的定序。
隨著機器人系統和處理能力的進步,高通量篩選變得更快、更可靠。分子生物學以外的科學家也開始將這些方法應用於各自的領域。例如,藥理學家利用高通量篩選同時篩選數百種化合物的生物活性,從而發現潛在的新藥;而人類連接組計劃的神經科學家正在繪製健康大腦中1000億個神經元的圖譜。這項工作有望揭示大腦整體的連接方式,以及受損大腦的連接錯亂。
直到最近,海洋考古學才開始涉足高通量技術領域。當時尚無適用於該領域的自動化系統,而且收集大量數據集的概念也與沉船考古的傳統做法相悖。大多數考古學家並不傾向於對眾多遺址進行粗略的調查,而是更喜歡在一個或少數幾個遺址進行長達數年的研究。由於考古學往往更依賴解釋而非量化數據,因此它常常被歸類為歷史學和文化人類學等其他軟科學。
弗利正試圖將海洋考古學發展成一門嚴謹的科學,使其更接近生物學或物理學。他說他並不在意對每一艘沉船進行細緻的考察。相反,他計劃實現成百上千艘沉船的自動發現,將它們轉化為龐大的數據集,然後從這個數據集(而非沉船本身)中尋找問題的答案。
地中海大多數的古代沉船殘骸不過是一堆雙耳陶罐,這種雙耳陶罐曾被用作運輸容器。但科學家已經開發出一些方法,可以從中獲得資訊。透過研究殘骸堆的大小(曾經的船隻早已腐朽殆盡)和陶罐的形狀,考古學家通常可以確定沉船的來源地和年代。沉船的位置也能提供一些關於其目的地的線索。
考古學家通常將地中海沉船的年代定為羅馬或拜占庭時期,當時海上貿易已經相當發達。雖然這些數據對弗利來說很有用,但他尤其關注青銅時代沉船的發現,這些沉船的年代介於公元前3500年至公元前1200年之間。它們是該地區最早的遠洋船隻,因此它們的沉沒地點和船上物品可以揭示當時哪些文化彼此接觸。但這類沉船極為罕見。
「弗利正努力將海洋考古學打造成一門嚴謹的科學,使其更接近生物學或物理學。」弗利以數據驅動的海洋考古方法並非全新。例如,1992年,考古學家AJ·帕克對地中海已知的1259艘沉船進行了編目。但弗利指出,這些數據還很原始,而且收集方式的不一致使得沉船之間的比較變得困難(有些沉船是眾所周知的發掘地點;另一些則是潛水員偶然發現的,與專家發掘的沉船不同,這些沉船可能沒有按年代或來源進行正確分類)。弗利的機器人將收集統一的數據,以便考古學家能夠直接比較不同的沉船。
在描述自己的工作時,弗利能把高通量考古說得輕而易舉,彷彿地中海所有沉船的測繪、數位化和儲存只是時間問題。事實並非如此。弗利的方法未經證實,技術難度高,而且成本昂貴。他為期一個月的克里特島考察耗資約50萬美元——這筆錢相當於他全年的預算——對大多數考古學家來說,這筆錢需要分攤五年才能用完。為了支付機器人和操作人員的費用,弗利像大多數海洋科學家一樣,向美國國家科學基金會和國家海洋與大氣管理局申請撥款。但他的資金大部分來自其他管道,主要是私人捐助者。除了搜尋沉船之外,弗利還在積極爭取潛在的捐款者。光是去年,他就參加了數十場募款活動。
弗利對私人募款的重視程度在大多數科學家中並不常見,但他卻毫不掩飾地這麼做。事實上,他正努力爭取將年度預算增加五倍,達到250萬美元。 「為什麼物理學家可以擁有像歐洲核子研究中心(CERN)那樣價值數十億美元的設施,而考古學家卻不能?」當我問及高昂的費用時,他反問道。 「你真的關心μ子是什麼嗎?除了物理學家,還有誰真正關心μ子是什麼?我認為,理解人類的本質同樣重要,甚至可能更重要。”

在迪亞國家海洋研究所參觀幾天后,格雷格·帕卡德在伊拉克利翁附近海域為我即興演示瞭如何操控機器人。帕卡德是馬薩諸塞州伍茲霍爾海洋研究所的一名身材精瘦的工程技術員,他站在研究船“阿爾基翁”號的船尾,用一根桿子戳著一個五英尺長的黃色魚雷,那魚雷漂浮在水面上,離他很遠。這根魚雷其實是一台價值37.5萬美元的Remus 100型自主機器人,由伍茲霍爾研究所借出,配備了攝影機。在80分鐘的測量任務進行到三分之一時,機器人出現了漏水。它自動中止了任務,返回了船上。帕卡德正試圖用桿子鉤住機器人的頂部,以便將其拉向「阿爾基翁號」的絞車,然後拉上船。
經過一番費力的搬運和絞盤操作,並在另一位技術人員的幫助下,帕卡德終於將這艘重達80磅的機器人抬上了「阿爾基翁號」的甲板,並裝進了一個破舊的考察箱裡。隨後,他和幾位希臘同事從船尾放下了第二艘「雷穆斯號」,這艘機器人配備了聲吶。機器人在水面遊動了一會兒,帕卡德用一台加固型筆記型電腦測試了它的追蹤系統,之後它便潛入水中,消失在視線之外,駛向一片未知的海底區域。
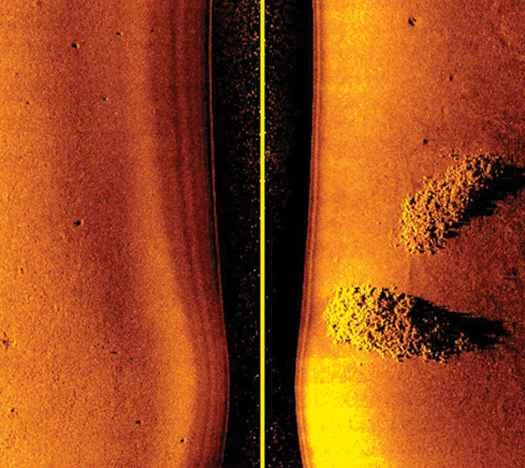
弗利的數據採集系統以這兩台雷姆斯(Remus)機器人為核心構建。首先,配備聲吶的「聲學」雷姆斯機器人掃描海底。它以網格狀模式在水面下328英尺(約100公尺)深處航行,其換能器向海底發射聲吶波束。這些訊號會從包括大型魚類、岩石和沈船在內的固體物體上反射,從而在最終影像中形成高光和陰影。在這次航行中,除了聲學雷姆斯機器人外,阿爾基翁號(Alkyon)船體上還安裝了一台多波束聲吶。借助這台聲吶,團隊掃描了大片海底區域,但解析度低於聲學雷姆斯機器人。
如果帕卡德在聲吶資料中發現可能表明沉船的陰影,他就會派出配備攝影機的「雷姆斯號」潛水器。聲吶圖像難以解讀,因此必須用影片來檢查潛在的沉船。一旦確認有沉船,潛水隊就會下潛到沉船地點,拍攝數百張照片。之後,一名研究生會將這些照片數位化拼接,並在「照片拼接圖」上標註位置和深度資料。
在陸地上,讓機器人收集資料、電腦分析資料聽起來是個好主意,但在野外作業卻面臨許多挑戰。首先,地中海面積遼闊。以弗利目前的作業速度,他需要2658年才能繪製出整個地中海的海底地圖。其次,地中海海底的許多區域都在不斷變化,流沙覆蓋著水下的一切。第三,機器人的感測器無法在靠近島嶼和海岸線、海底附近坡度陡峭的區域作業,只能在沉船殘骸較多的地方作業。這些區域需要潛水隊,減緩了發現的速度。而能夠加快潛水速度的設備價格昂貴。每個推進器售價3500美元,每個循環呼吸器售價15,000美元;弗利此次行程攜帶了四個推進器和六個循環呼吸器。
如果弗利能夠克服這些挑戰並收集到數據,他接下來還將面臨另一個難題:如何分析這些數據。他尚未確定分析方法。當我問他時,他說數據分析是他選擇「暫時擱置」的問題。他確實提到,一種可能的方案是開發影像辨識軟體,用於識別船隻大小和雙耳細頸瓶形狀,按年代和來源對沉船進行分類,並將這些資訊與位置資料和潛在目的地關聯起來。這樣,他就可以辨識出例如愛琴海南部所有青銅時代的沉船。如果資料集夠大,資料中的模式或許會啟發弗利提出一些他從未想過的問題。
我和帕卡德坐在「阿爾基翁號」上,等待聲學偵測器「雷姆斯」完成偵測任務。這時,一艘漁船出現在離船頭幾英里遠的地方。帕卡德從他一直用筆記型電腦監控「雷姆斯」的船艙裡出來,打量著那艘漁船。他皺了皺眉,又回到船艙裡,輸入了幾條指令,重新設定「雷姆斯」的航向,讓它駛入更安全的水域,以免漁民在捕撈獵物時誤捕它。
加州大學洛杉磯分校專門研究科學量化的歷史學家西奧多·波特表示,一個領域從解釋性研究轉向數據驅動研究並非史無前例。波特指出,地理學就是一個已經高度量化和數據驅動的領域。在過去的五十年裡,繪圖技術和靜態製圖方法與地理資訊系統融合,後者從眾多資料來源提取數據,創建數位化的互動式地圖。經濟學也從一門解釋性科學轉變為一門數學驅動的科學(儘管這種轉變的成功程度取決於你問的是誰)。
哈佛大學考古學家兼歷史學家麥可‧麥考密克表示,幾十年來,考古學家一直在朝著更量化的研究方法發展。他們已經使用放射性碳定年法和DNA分析等技術將實體轉化為數據。弗利的方法是更進一步的。
採取這一步驟後,便會形成一個自我維持的數據回饋循環。數據越多,選擇越多。考古學家無需親自前往每個沉船遺址來判斷其是否值得探索。能夠只針對重要的沉船遺址進行挖掘,將帶來更有效率的挖掘工作,進而產生更多可供分析和交叉比對的數據,從中或許能夠發現一些規律,從而更深入地了解古代世界。
高通量考古不會取代傳統的考古技術,例如挖掘。麥考密克認為,這兩種方法是互補的。 「一艘經過精心挖掘並發表的沉船,就像一個絕佳的時間膠囊,封存了它沉沒的時代和地點,以及它航行的航線,」他說。 「但是,100艘沉船,即使我們對每艘沉船隻了解一點點,也能為我們提供截然不同的證據,我們可以將它們與那些精美絕倫、獨一無二、極為罕見的完整挖掘沉船進行比較。它們之間會相互啟發。”

希臘探險兩週後,我打電話給弗利,詢問我離開後情況如何。他正忙著準備一份呈現給雅典美國古典研究學院理事會的報告。 “我們表現相當不錯,”他說。一個月內,團隊發現了八艘沉船。誠然,其中三艘是現代沉船,而五艘古代沉船中,有一艘羅馬船先前已在庫斯托對迪亞島的研究中被發現。無論是潛水員還是機器人,都從未發現過青銅時代的沉船。
儘管如此,弗利表示他並未氣餒。四艘新發現的古代沉船加上庫斯托號沉船,為他的資料庫增添了五個數據點。他說,他的捐款者都知道找到一艘青銅時代的沉船希望渺茫。他還表示,雷姆斯號聲學探測器發現了沉船,這讓他備受鼓舞——他說,這證明他的系統是有效的。
甚至在離開克里特島之前,弗利就已經為來年制定了幾項探險計畫。今年春天,他可能會首次勘測阿爾及利亞附近海域。他的阿爾及利亞同事將使用船載聲吶來尋找水下地震斷層;弗利希望藉助聲吶在過程中發現一些沉船殘骸。他也正在努力與埃及和利比亞建立新的聯繫,因為去年與他談判的人已經在阿拉伯之春中被推翻了。
弗利表示,他還計劃擴充他的機器人艦隊,增加像Remus 6000這樣更大的自主水下航行器(AUV),這種航行器可以潛到19685英尺(約6000公尺)的深度。這些新增的機器人將使他能夠探索許多新的區域,甚至可能包括地中海最深處的區域。
「即使我們對100艘沉船了解甚少,它們也能為我們提供截然不同的證據。」在克里特島探險之後,弗利收集了34艘古代沉船的信息,其中一些是通過傳統方法發現的,而他的潛水員和自主水下航行器(AUV)則在他的數據庫中發現了其他沉船。雖然這與30萬艘沉船的目標相去甚遠,但這並不意味著他的工作毫無價值。弗利其實並不需要將所有30萬艘沉船都編入目錄。他只需要幾百艘,或許幾千艘,就能在各種查詢中獲得統計意義。如果擁有更多的機器人和資金,他完全可以做到。即便他最終沒有這樣做——即便弗利只是每年向資料庫中添加少量沉船——他也計劃在未來25年左右繼續這項工作。 「我不會去別人的實驗室裡插手,問他們正在做的事情是否值得做,」他說。 “如果你能籌集到資金,開展你的項目,發表你的論文,你還需要什麼證明呢?”
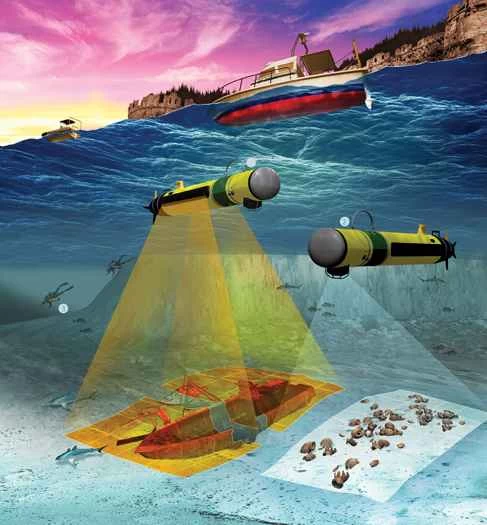
更快找到沉船
例如,聲學型 Remus 100 AUV 利用聲吶掃描一平方英里的海底區域,這個過程大約需要 4.5 小時。聲吶訊號從大型物體上反射回來,形成高光和陰影,從而顯示出沉船的大致輪廓。
2.如果聲吶影像顯示有沉船,視訊探測器「雷姆斯」將對該區域進行定向掃描。由於視訊偵測器無法拍攝高品質影像,因此任何經視覺資料確認的沉船都將由潛水員團隊隨後拍攝照片。
3.水下懸崖會幹擾聲吶訊號,因此在海底靠近懸崖的區域,弗利的團隊會透過潛水來搜尋沉船。配備循環呼吸器的潛水員可以在水下停留的時間大約是使用水肺潛水員的三倍。推進器使他們能夠勘測的範圍是依靠自身動力游泳的潛水員的兩倍。
沉船肖像
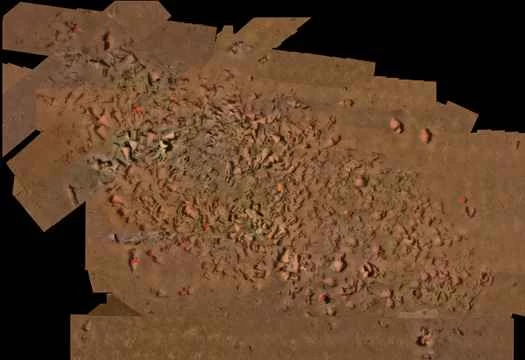
就像這艘西元前4世紀的沉船一樣,古代沉船大多只剩下散落的雙耳陶罐殘骸,但它們仍蘊含著大量資訊。一旦確定了沉船的位置,潛水員就會用尼康D100和D300相機拍攝數百張照片。這些照片會被拼接成一幅馬賽克照片(如上圖所示),然後添加沉船的位置和深度等資訊。
布魯克·博雷爾是《大眾科學》雜誌的特約編輯,現居布魯克林。