正如火星好奇號探測器拍攝的「七分鐘恐怖」影片所展示的那樣,在遙遠的星球上著陸可能極其困難。如今,科學家設想了一種可以從太空直接投放到土星最大衛星土衛六上的機器人。這種球形機器人無需氣囊緩衝下落,因為它整個柔性體本身就是一個緩衝墊。撞擊土衛六表面後,機器人會像風滾草一樣滾動,探索這片陌生的地形。
這款「超級球形機器人」是美國太空總署機器人專家維塔斯桑斯皮拉爾(Vytas SunSpiral,沒錯,這就是他的真名)與阿德里安·阿戈吉諾(Adrian Agogino)及其同事共同構想的成果,他們計劃在9月中旬完成一個完整的原型。在研發這款機器人的過程中,他們或許已經開創了一種革命性的新型機器人。
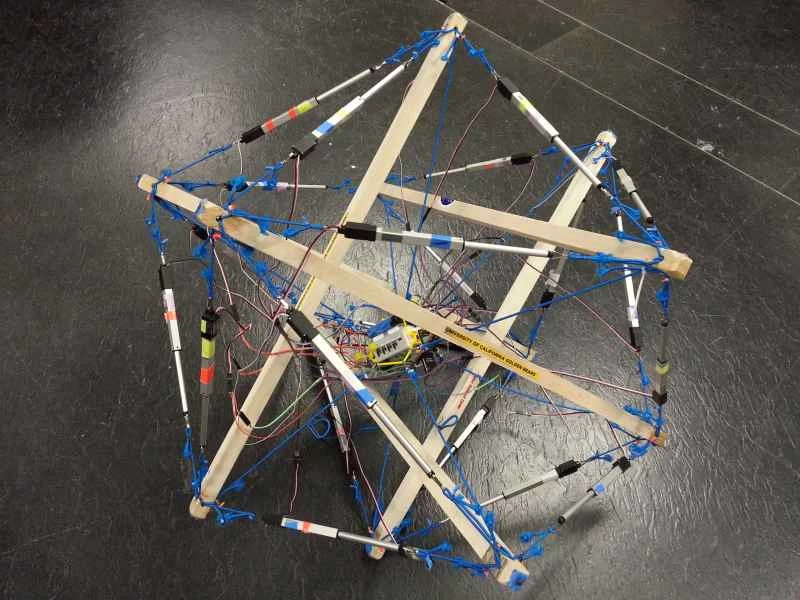
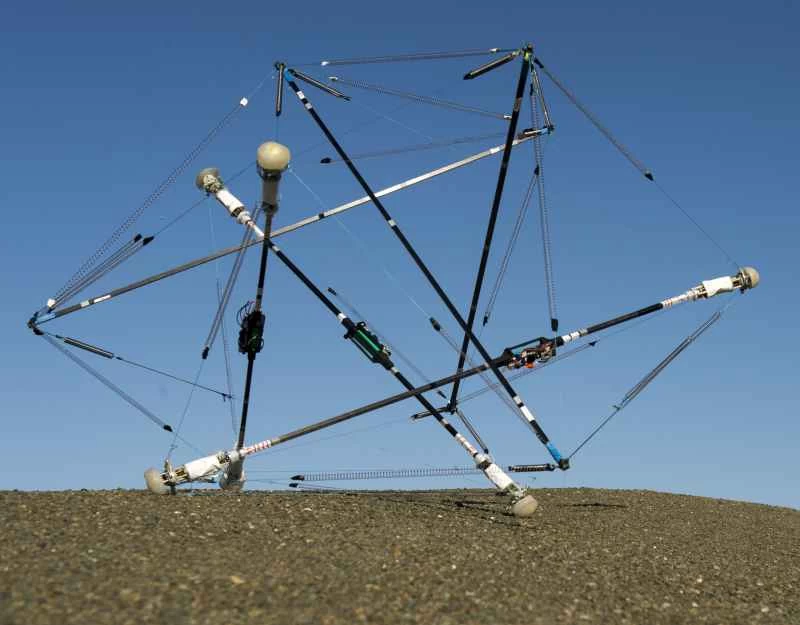
這款超級球形機器人看起來有點像是由電線和桿子組成的貓繩遊戲。位於桿子末端的馬達、電池、感測器和電子控制系統可以調整電纜的鬆緊度。透過改變電纜的鬆緊度,機器人可以實現折疊、展開或滾動等動作。機器人會將搭載的科學儀器懸掛在機身中部,並在必要時將其降至地面,以分析表面和採集樣本。機器人內建的無線通訊系統可讓使用者遠端操控機器人。
這種機器人是一種“張拉整體結構”,簡稱“張拉整體”——它將受張力的構件(纜索)與剛性構件(桿件)結合在一起。這種結構原理最早由雕塑家肯尼斯·斯內爾森在1940年代發現,並在1960年代由發明家巴克敏斯特·富勒探索其在建築領域的應用。後續研究發現,張拉整體結構在生物學中普遍存在——例如,人類的脊椎既依賴椎骨,也依賴環繞和支撐椎骨的肌肉、肌腱和韌帶。
「我們正在突破傳統的剛性機器人製造方法,這種方法會導致關節和其他常見故障點周圍的力被放大,而我們則依靠張拉整體結構來製造尖端機器人,這種結構可以將力分散到整個結構中,」SunSpiral說道。 “通過製造具有極強吸力能力的機器人,我們可以構建一個既能著陸又能移動的系統,而不是像使用一次性安全氣囊那樣用完就扔。這可以節省執行任務所需的大量質量,從而降低成本。”
研究人員設想,在泰坦星上投放超級球形機器人,每個機器人都會配備隔熱罩,以防止它們在泰坦星大氣層中燃燒殆盡。泰坦星的表面重力約為地球的七分之一,這意味著這些機器人的最終速度——即它們在泰坦星濃厚大氣層中下落的最快速度——約為每小時33英里,大致相當於從地球上30英尺(約9公尺)高度下落後的速度。 「我們投放的早期原型機能夠經得起這種衝擊,」SunSpiral公司表示。
這些機器人如果落到火星上,生存難度會更大,因為這顆紅色星球的大氣層比土衛六稀薄,引力也更強,這意味著它們會達到更高的極限速度。 “但或許一個簡單的降落傘就能讓它們減速到足以安全著陸的程度,”SunSpiral公司表示,“我們仍在研究這些機器人能夠以多高的速度著陸。”
即使這些機器人著陸時某個部件發生損壞,由於張拉整體結構的各個部分相互依賴,即使部分部件損壞,機器人的其他部件也能彌補其不足。 “我們預料到某些部件可能會發生故障,”比利時根特大學的機器人專家肯·卡盧瓦茨(Ken Caluwaerts)表示,“我們正在開發一種分佈式控制系統,這樣即使四分之一的電機發生故障,結構也能繼續滾動。”
“你可以把它們從懸崖邊滾下去,或者滾下熔岩管。”
這些機器人的潛在穩健性意味著它們可以承擔傳統機器人不敢承擔的風險——「你可以把它們從懸崖邊滾下去,或者滾進熔岩管裡,」SunSpiral說。此外,張拉整體機器人通常可以折疊成緊湊的形狀,這對於空間有限的太空任務至關重要。另外,由於機器人的所有控制系統都安裝在每根桿末端的帽狀結構中,「這意味著我們可以製造各種尺寸的機器人——如果我們需要,可以透過改變桿的長度,將機器人的尺寸放大一倍或縮小一半,」SunSpiral說。
「這項研究非常引人入勝,」哈佛大學的機器人專家薩姆費爾頓說道,他並未參與這項研究。 “這些張拉整體機器人潛力巨大,我期待看到這些機器人還能學會哪些其他技巧。”
SunSpiral指出,雖然張拉整體結構的強度源自於各部分之間的相互依存關係,但也正是這項特性使得設計和控制具有張拉整體結構的機器人極具挑戰性。 「模擬這些結構與環境的所有互動方式也非常困難,」他補充道。
為了控制這些仿生機器人,SunSpiral及其同事開發了仿生控制系統。他們開發了用於控制機器人的演算法,這些演算法模仿了中樞模式發生器(CPG),這是一種動物體內的神經迴路,通常對運動、咀嚼、呼吸和消化等活動至關重要。 Felton表示,這使得機器人能夠自動翻滾,「就像你我無需思考就能呼吸一樣」。此外,研究人員還開發了一種借助演化演算法讓機器人自主學習翻滾的方法,這對於在其他星球上獨立運作的機器人來說非常重要,因為其他星球的運動規則可能與地球不同。
科學家正在研發的原型大致呈球形,重約35磅,直徑5英尺。 SunSpiral和他的同事預計,到9月中旬,原型車就能在戶外偵測車測試設施中進行測試。但SunSpiral表示,“在它成為NASA的正式任務之前,還有很多工作要做。”
為了幫助張拉整體機器人成為現實,SunSpiral 和他的同事們發布了開源的 NASA 張拉整體機器人工具包,該工具包基於遊戲物理模擬器 Bullet Physics 引擎構建,可在線上免費使用。 SunSpiral 表示,他們也正在開發「低成本、易於使用的張拉整體機器人套件,以便人們能夠輕鬆組裝新的張拉整體機器人,方便學生和研究人員進行研究和改造」。 “我們希望讓世界各地的人們探索這一革命性的概念,從而開拓新的領域。”