普通的原子筆在太空中無法書寫。由於沒有重力,墨水無法流動。這個簡單的故障揭示了太空探索中一個令人頭痛的問題:為地球環境設計的工具在微重力環境下往往失效。機器人,儘管技術先進,也難逃此劫。
國際太空站(ISS)上的自主飛行機器人經常會失去方向感。由於沒有重力來區分上下,即使是精密感測器也會產生累積誤差,導致機器漂移。直到最近,太空人有時還必須進行人工幹預,這會中斷他們緊湊的工作計畫。
美國國家航空暨太空總署(NASA)與光州科學技術院(GIST)的金彪鎮教授及其團隊合作,找到了解決這個長期難題的方案。金教授是導航技術專家,該技術旨在幫助機器人確定其三維位置和姿勢。他提出了一種演算法,可以顯著抑制這些誤差。透過將「絕對旋轉誤差」平均降低到1-2度左右,該團隊使機器人能夠在無需人工幹預的情況下執行長期任務。
我們與金教授進行了交談,探討了他如何將技術應用於宇宙探索,以及NASA的機器人取得突破性進展的原因。
利用數位孿生導航的節省空間機器人
國際太空站是一個巨大的軌道實驗室,大小與足球場相仿。它由不同國家開發的模組連接而成。在日本的實驗艙「希望號」(Kibo)內,美國太空總署(NASA)的自由飛行機器人「太空蜂」(Astrobee)正在辛勤工作。它的任務是承擔日常雜務,使太空人能夠專注於科研。由於任務時間精確到分鐘,任何維護工作都會分散太空人的注意力,造成不必要的損失。
然而,在實際運行中,Astrobee 的表現並不如預期般完美。它經常失去方向感,需要太空人介入重新校準。 NASA 的工程師和金教授的團隊合作,找到了一種讓機器人無需人工幹預即可可靠運作的方法,以便太空人專注於他們至關重要的研究。
迷失方向的根源在於缺乏明顯的重力。地面機器人依靠慣性測量單元(IMU)來感知相對於重力向量的傾斜和方向。金教授指出:「地面導航演算法是基於重力設計的,這使得它們難以直接應用於缺乏參考點的太空。」 因此,微小的誤差會隨著時間的推移而累積,最終導致機器人完全失去方向感。
為了解決這個問題,研究團隊轉向了基於視覺的導航(VBN),使機器人能夠透過攝影機觀察周圍環境來推斷自身方向。起初,團隊認為簡單地採用現有技術就足夠了。但他們錯了。
太空站內部雜亂無章,到處都是電纜、實驗設備和漂浮的個人物品。前一秒還能看到的景象,下一秒可能就被一台漂移的平板電腦擋住了。這種不可預測性讓標準的導航系統束手無策。 “我們當時以為可以應用地球上的技術,”金教授回憶道,“但它在國際太空站的環境下根本無法可靠運作。”
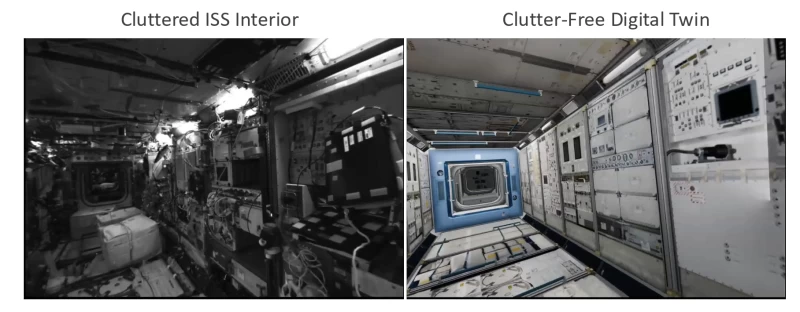
這項突破體現在「數位孿生」技術上,即物理空間的精確三維複製品。研究團隊利用NASA的藍圖,建構了一個經過最佳化的國際太空站虛擬模型,去除了所有瞬時幹擾物。機器人被編程為將相機拍攝的雜亂即時畫面與數位孿生產生的清晰影像進行交叉比對。
金教授解釋說:“數位孿生體充當了真實情況,使機器人能夠過濾掉視覺噪聲並重新校準其位置。”
利用這些修正後的數據,機器人將周圍環境解讀為一系列線條和平面。這些提取出的幾何特徵如同“視覺羅盤”,提供絕對的方向參考。該系統運用了“曼哈頓世界假設”,該假設認為人造環境主要由正交表面構成,例如牆壁和地板等相互垂直的表面。國際太空站的箱形艙段是檢驗此方法的理想平台。透過鎖定這些結構幾何形狀,機器人可以以最小的誤差進行三角定位。
該團隊實現了「無漂移」導航能力。應用這項新技術後,平均旋轉誤差降低至1.43度——而且該數值不會隨時間推移而增加。機器人不再需要人手引導。
金教授預計這項技術不僅在太空,在地球上也將發揮重要作用。它可以為GPS訊號無法覆蓋的室內環境中的無人機和機器人提供導航。該系統依靠視覺數據來檢測結構模式,因此非常適合用於線條和平面密集的建築物。金教授指出:“基於這些結構特徵的定向技術不僅適用於太空站,也適用於典型的城市環境。”
來自NASA合作的啟示
問金教授人類為什麼要冒險進入軌道,他的回答直截了當:“因為太空現在具有真正的經濟和工業價值,展現出商業潛力。”
SpaceX 證明了太空不僅可以是探索的前沿領域,還可以成為一項產業,由此催生了一大批新創企業,其業務範圍涵蓋月球採礦到衛星組裝等各個領域。然而,NASA 仍然是這場私人領域蓬勃發展背後的幕後推手。它數十年來累積的技術和人才構成了這些新興企業的基石。
正是這套生態系統吸引了原本是無人機專家的金教授加入其中。他的這段旅程始於攻讀博士學位期間在NASA艾姆斯研究中心的一次實習。當時,中心正全力研發Astrobee機器人。為了模擬微重力環境,研究人員利用二氧化碳噴射器將機器人懸浮在氣浮台上,並透過控制光照來嚴格測試其定位能力。

這項研究與金教授的專長完美契合。他在該機構的工作經驗讓他意識到,儘管地面無人機和太空機器人所處的環境截然不同,但它們擁有相同的理論基礎。繪製環境地圖和確定位置的邏輯是通用的,差異僅在於具體應用。
當時建立的聯繫持續了近十年,並發展成為目前的聯合研究。金表達了他的感激之情:“如果沒有我當時的導師布萊恩·科爾頓博士、我的NASA同事、我現在的合作研究員瑞安·蘇珊博士以及為我提供實習和聯合研究機會的特里·方博士的幫助,這項研究是不可能完成的。”
金教授尤其對該機構對待失敗的態度印象深刻。在他任職期間,他親眼目睹了美國NASA在雄厚的預算和傑出人才的支持下,進行大膽的實驗。 「因為只有成功的計畫才會被公開,所以看起來他們似乎從未失敗過,」金教授說,「但每一次公開的成功背後,都隱藏著數十次默默無聞的失敗。」他指出,NASA的優勢在於它願意承受這些挫折,最終取得突破性進展。
這種對實際影響的關注也影響了他們的評估標準。除了傳統的學術指標外,NASA 特別重視研究的實際影響和應用價值。雖然博士畢業後提交兩篇論文是慣例,但有些研究人員只提交一篇,或選擇將研究成果發佈在 arXiv 等預印本伺服器上,而不是正式期刊上。
「儘管作為政府機構,NASA的性質較為保守,但它在研究方法上卻出人意料地開放,」金回憶道。 “NASA重視研究的內在價值和貢獻,而不是僅僅關注研究結果,這一點給我留下了深刻的印象。”
對科學的持續投入為龐大的工業基礎設施和無數由NASA前員工領導的太空創業公司鋪平了道路。金教授指出,美國擁有強大的製造商生態系統,這些製造商專門生產能夠承受極端條件的「航太級」零件。這形成了一個良性循環:政府投資培養人才和技術,進而推動創業浪潮,最終帶動私部門的發展。
對於那些渴望加入該機構的人,金教授提出了基於現實的建議。
我想給你一些切實的建議。我在NASA遇到的研究人員都來自世界頂尖大學。這聽起來可能有點老生常談,但你必須在數學和整體學習中都表現出色。擁有遠大的夢想固然是好事,但要將夢想變成現實,需要超凡的能力。通往國際舞台的大門永遠為你敞開。如果你努力提升自己的技能,機會一定會隨之而來。
本文為《大眾科學韓國版》NASA影響力系列報導的一部分。